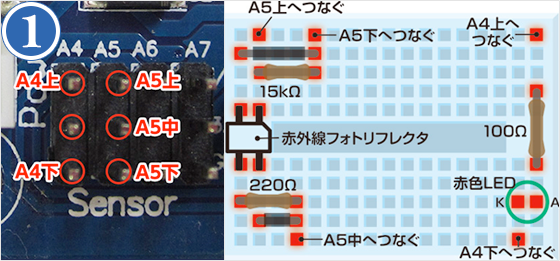
ブレッドボードに画像右上のように回路を組んで、スタディーノの端子(左上画像参照)につなげよう。赤色LEDをスタディーノのA4、赤外線フォトリフレクタをスタディーノのA5につなげる。そして写真にはないけれど、サーボモーターをスタディーノのD9につなげよう(黄色のケーブルを内側にして差込もう)また、電池ボックスの電源も接続しよう。
使用部品は以下の通り:
■スタディーノ基板
■ブレッドボード
■電池ボックス&単3形アルカリ乾電池
■マイクロサーボ SG-90
■LED 赤
■赤外線フォトリフレクタ[RPR-220]
■抵抗 100Ω、220Ω、15kΩ 各1個
■ジャンパー線 オスーオス 2本、オスーメス 5本
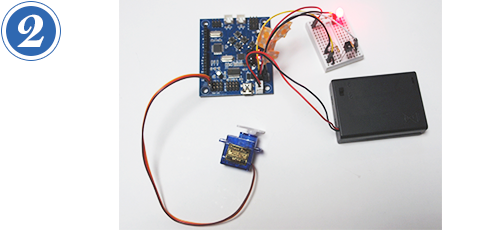
つなげたら、写真のようになったかな。なったら、mini USBケーブルでパソコンとスタディーノをつなごう。このページからトップページに戻って、シャクトリムシの「プログラム」ボタンをクリックして、1〜10の手順どおりに赤外線のテストをしてからプログラムをつくろう。そして、そのプログラムをスタディーノに転送しよう。
まずは動作確認、電源のスイッチをONにしよう。スタディーノ上のLED(A4)が赤く点灯し、サーボモーターが短く「シャッ」と動けばOK!正しく電源が入っている。赤外線フォトリフレクタに手をかざすかリモコンボタンを押すとLEDが点灯し、サーボモーターがゆっくり回転したあと素早く元に戻る動作を繰り返せば、正しくプログラムが動作していることになる。
プログラムの動作を確認できたら、いったん電源のスイッチをOFFにしてから、再度ONに設定しよう。これはサーボモーターの軸を原点の位置に戻しておくため。このとき赤外線赤外線フォトリフレクタに手をかざしたり、リモコンボタンを押したりしないように。

いよいよシャクトリムシのボディー作りにはいるゾ。まずは以下のものを用意しよう。
■タミヤ 楽しい工作シリーズ No.157 ユニバーサルプレート 2枚セット(70157)
■タミヤ 楽しい工作シリーズ No.164 ユニバーサル金具4本セット(70164)
■両面テープ
■かまぼこ板
■マスキングテープなどのテープ
■ミニゼリーのカップ 2個
■針金 少々(サーボモーターと金具を固定するため)
■好きな色の油性ペン(ムシの顔を描く)
■プラスドライバー
■はさみ
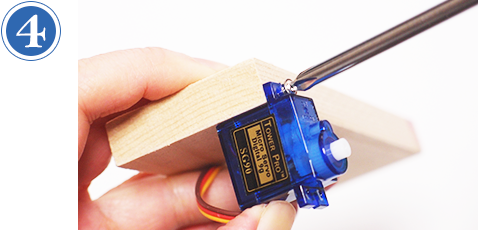
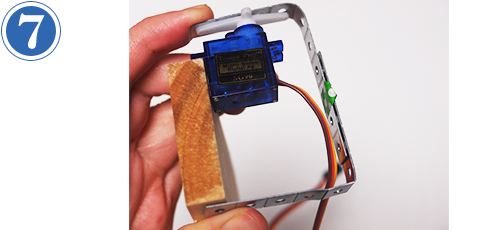
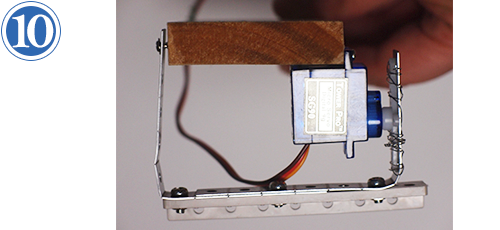
サーボモーターを取り付けよう。まずサーボモーターをかまぼこ板にとりつける。写真の位置に、サーボモーターに入っている大きい方のネジをつかって、固定する。板とモーターの間に隙間ができないよう、しっかりとはさんでねじ止めしよう。
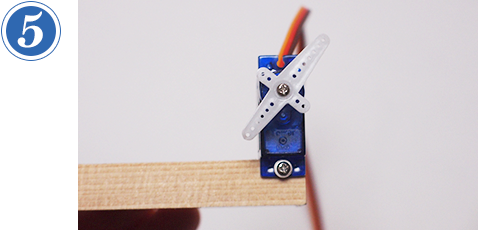
次に、サーボモーターに入っている白いプロペラのような部品(サーボホーンという)を取り付ける。長さの違う種類が入っている場合は、長い方を付けるとよいだろう。写真のように、かまぼこ板の後ろ側へ少し傾いたところで、軸に入る位置に差し込む。差し込んだら小さい方のネジで止める。(ネジはかならず小さい方を使うこと。大きい方で止めるとしっかり固定できず、サーボモーターを動かすとすぐに外れてしまう)
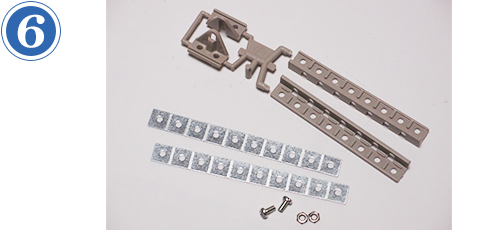
脚を取り付けよう。脚は、ユニバーサル金具2本、付属のネジ、ナット(一番小さいもの2個ずつ)、ユニバーサルプレートに入っているL字型のパーツ(つながっているので、切り離す)2本を使う。あと写真にはないが、サーボモーターに入っている大きい方のネジを使う。
ユニバーサル金具を折り曲げてコの字型の土台をつくる。かまぼこ板のカドを使うときれいに曲げられる。サーボモーター側と反対側とでは、折り曲げる長さが違う。サーボモーター側は、穴4つ目のところで折り曲げるとよい。反対側は、かまぼこ板の幅によるが、穴5つ目くらいのところがよい。写真のように、実際にかまぼこ板の幅にあわせてみてから、折り曲げよう。幅が決まったら、テープで留めておく。
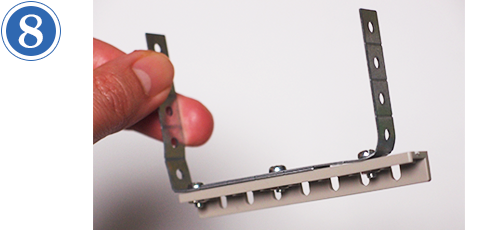
L字型のパーツと、折り曲げたユニバーサル金具を重ね、両端と真ん中の3か所をネジで固定する。
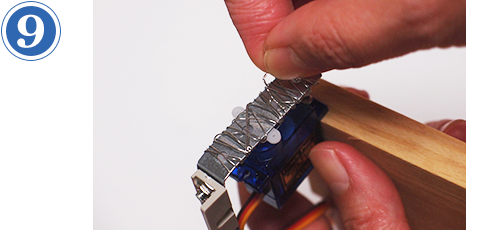
脚を本体に取り付ける。L字型のカドが、かまぼこ板の後ろ側になるように取り付けよう。サーボモーターと脚は、針金を巻いて固定する。サーボモーターに取り付けたプロペラのようなパーツの小さな穴と、ユニバーサルプレートの穴が重なったところに針金を通して、ぐるぐる巻きにしよう。巻き終わったら2本の端をねじって巻きつけておこう。
サーボモーターと反対側は、サーボモーターに付属していた大きい方のネジを使って止めよう。ちょうどサーボモーターをねじ止めした位置と、ほぼ同じような位置で止める。ここではネジを奥まで回さず、半分くらいまでにしておいて、ユニバーサル金具を固定しないようにしておく。これで脚は完成だ。

マスキングテープで装飾したい場合は、ここで貼っておこう。板の表はスタディーノと電池ボックスでほとんど見えないので、前に少し貼っておく。側面と脚にも貼っておく。
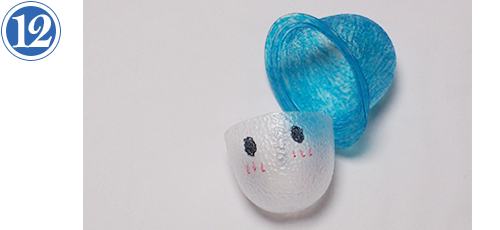
顔をつくろう。一口サイズゼリーの空き容器のふちをハサミできりとり、顔を油性ペンで書く。帽子はフチをつけたまま油性ペンで塗る。
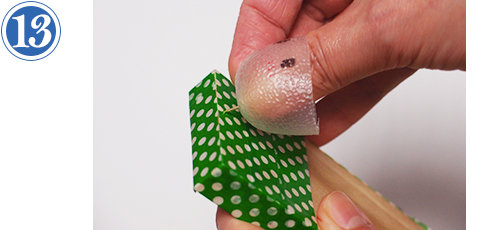
押しピンでかまぼこ板の前部分に固定する。顔の後ろ寄りから、かまぼこ板の前に向かって斜めに突き刺すとよい。顔をつけない場合でも、代わりに押しピンだけ刺しておこう。顔は上に乗せる基板が滑り落ちないようにストッパーの役割をするのだ。

顔と帽子にそれぞれティッシュを詰め込んで、帽子の中に顔を押し込むようにして固定する。細く切った粘着テープかマスキングテープを、帽子のヒモのようにして貼る。
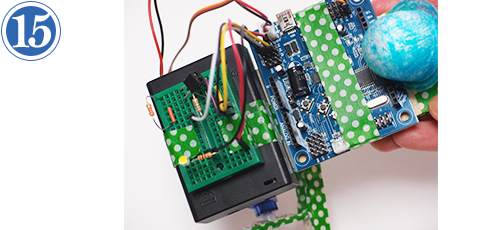
基板、ブレッドボード、電池ボックスを固定しよう。一度、基板と電池ボックスを上にのせて、電池ボックスの大体の位置を確かめてみてから、基板をいったん取り除く。電池ボックスはかまぼこ板から少しはみ出すくらいがちょうどよい。電池ボックスを粘着テープかマスキングテープでかまぼこ板に固定する。電源スイッチが表になるようにおくこと。のせたら、ブレッドボードと基板(配線済み)を固定して、電池ボックスとサーボモーターのケーブル(D9)を基板に取り付ける。
電池ボックスのスイッチをONにして、[編集]メニューの[モーター校正…]で、金具でつくった脚がかまぼこ板の体に対して垂直になるようにD9の角度を調整しよう。
できたら一旦電池をOFFにしてもういちど電源をいれ、動作を確認してみよう。リモコンを検知してサーボモーター(脚)が動くかな?終わったら、電池ボックスのスイッチをOFFにしておこう。動かしてみて、パラメータを変えたくなったらもう一度パソコンとUSBケーブルでつないで、変更したプログラムを書き込もう。

これで完成だ!ここで紹介した方法以外にも、オリジナルデザインのシャクトリムシをつくってみてはどうかな?
※動かしてみて、もし後ろにひっくりかえってしまったときの対策法を記しておこう。電池ボックスの重心が後ろすぎると、脚を伸ばしたときに転倒してしままう。基板、電池ボックスを前の方に移動してみよう。かまぼこ板の長さに余裕がないようなら、基板が少しかまぼこ板に乗り上げる状態でよいので、電池ボックスを少し前の方に移動させよう。