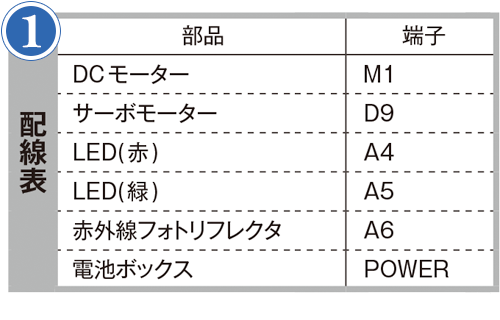
スタディーノ基板とパソコンをUSBケーブルでつなぎ、パソコンでブロックプログラミング環境を起動しよう。起動したら、[編集]メニューの[入出力設定…]を開き、上図を参考に設定しておこう。

障害物よけロボカーのプログラムは上の通り。このとおりに組んでみてね。
1 DCモーターの速さを100にセットして、「停止」で止めている。速すぎるときは、数値を小さくしてね。
2 いきなり動かないように、赤外線フォトリフレクタに手を近づけるまでは次に進まないようにしている。
3 ここから繰り返しが始まっている。まず、ハンドルをまっすぐにして前進。
4 障害物を見つけたかどうかのチェック。赤外線フォトリフレクタの数値が3より大きいときは、前方に障害物があるとみなしている。感度高めの設定なので、この値は実際に実験して決めてほしい。
5 障害物があったので、後退。
6 左右のどちらにハンドルを切るかを1か2の乱数で決めて、1なら左、2なら右に。
7 ハンドルを切った向きに前進。あとは上に戻って繰り返し。